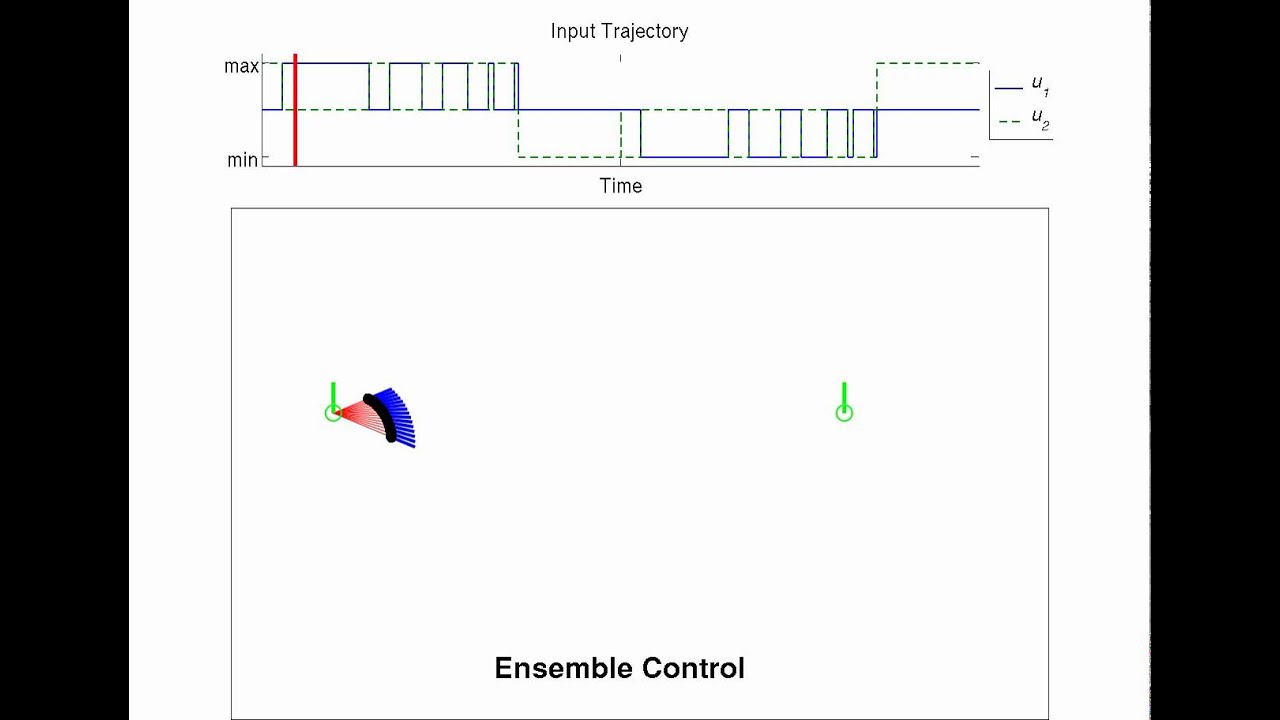
Controlling many differential-drive robots with uniform control inputs IJRR Multimedia 0:54 9 years ago 204 Скачать Далее
Range and Bearing Control of Many Differential-Drive Robots with Uniform Control Inputs Aaron Becker 1:33 11 years ago 6 565 Скачать Далее
Feedback Control of Many Differential-Drive Robots with Uniform Control Inputs Aaron Becker 1:55 12 years ago 1 404 Скачать Далее
Position Control of Differential Drive Mobile Robot - Complete Tutorial with Simulation Animation Aleksandar Haber 16:12 9 months ago 5 598 Скачать Далее
Control of Mobile Robots- 2.2 Differential Drive Robots mouhknowsbest 8:13 11 years ago 109 002 Скачать Далее
Controlling a Robotic Continuum with a uniform control signal Aaron Becker 0:15 12 years ago 208 Скачать Далее
Trajectory following with 6 robots that all receive the same control inputs Aaron Becker 0:11 12 years ago 215 Скачать Далее
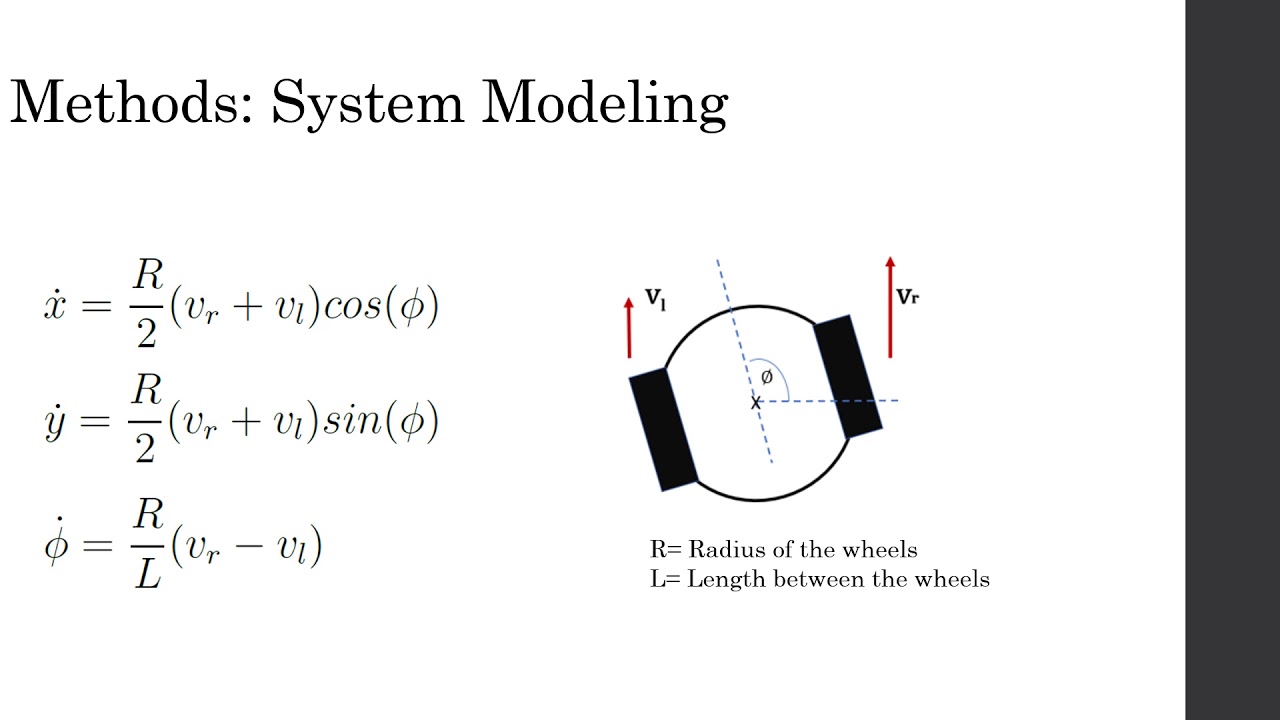
System Modeling: Path Tracking for Differential Steering Drive Autonomous Robots Computational Medicine Lab 4:37 4 years ago 10 919 Скачать Далее
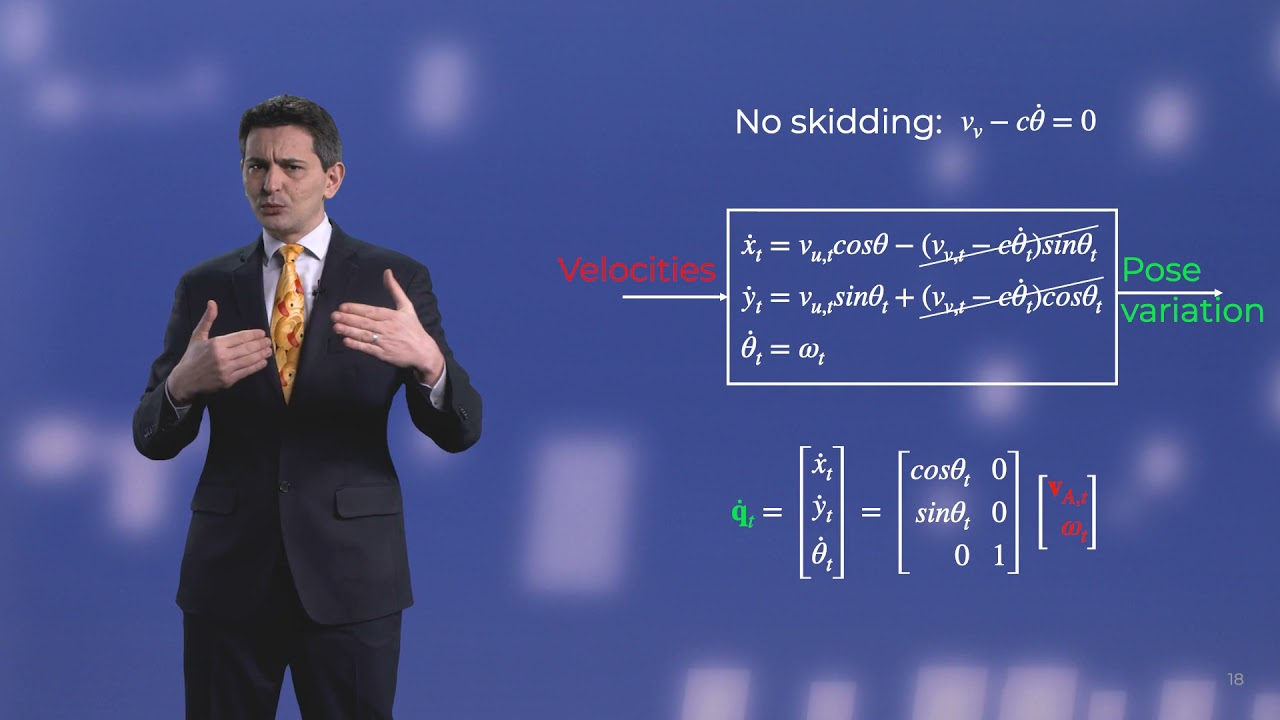
PD Pose Control of Differential Drive Robots Considering Kinematics Only Engineering Educator Academy 41:34 3 years ago 7 555 Скачать Далее
Differential drive robot with speed control + Arduino Code Fahmi Ghani 2:11 8 years ago 6 453 Скачать Далее
Mark 01 - Differential Robot #4 : Odometry and PID Controller GusBots 11:09 3 years ago 35 937 Скачать Далее
Control of Differential Drive Robots for Path Traversal Engineering Educator Academy 54:29 2 years ago 5 251 Скачать Далее